
前言
在前篇文章控制器區域網路(CAN bus)特性與重點,講述了 CAN 的基本特性、CAN 的種類、差異及資料幀的內容。
在傳統的資料傳遞過程中,通常是透過定義好特定的 ID,與定義了 8 個位元組資料分別代表什麼訊號,並搭配 DBC 檔案進行詳細說明與解碼。
CAN 協定本身只定義了如何在網路上傳遞資料,並沒有詳細規定資料的內容和格式。因此,需要引入一些進階協定(Higher Level Protocol,HLP),例如CCP/XCP、CANopen、AUTOSAR、J1939等,以滿足不同的需求和應用場景。
以未使用 HLP 的 CAN 為例子,我們可能定義 ID 為 0x100 的前 4 個位元組表示車速,範圍為 0 至 150,單位是 km/h;後 4 個位元組表示檔位資訊,其中 1000 表示 P 檔,0100 表示 D 檔,依此類推。不同廠商會有各自不同的定義,通常會使用一張大型的 Excel 表格或 DBC 檔案來記錄並說明解碼方式。
SAE J1939 介紹
SAE J1939 協定由美國汽車工程師協會(society of automotive engineers,SAE)制定。其中的一些特性在於:
- 使用 29 位元的擴展識別碼(Extended Identifier)。
- 使用 CAN 2.0,傳輸速率為 250 kbps 或 500 kbps。(*)
- 具有點對點尋址(節點尋址)和全域尋址(訊息尋址)。
- 多封包訊息最多可傳輸 1785 位元組。
- 通過自己的網路管理進行網路存取控制。
- 用於整體車輛通訊的標準化訊息。
- 允許特定於製造商的訊息定義。
- 定義自己的診斷介面。
由於 J1939 主要使用擴展幀進行通訊,識別碼從原本的 11 位元擴展到 29 位元,因此可以在識別碼欄位中包含一些進階資訊,如優先權、資料頁、群組編號等參數。
SAE J1939/14 物理層標準 首次發佈於 2011,定義了 500 kbps 的速度。 SAE J1939/22 CAN FD 資料連結層 定義了 CAN FD 作為 J1939 的傳輸曾實現,在現實生活中(≈2024),多數採用的還是 CAN 2.0 作為標準的傳輸層。
封包格式
SAE J1939-21 文件定義了 29 位元 CAN ID 如何規劃,如下表所示一共為 29 個位元:
| Parameter group number (PGN) | ||||||
| Priority | Extended Data Page | Data Page | PDU Format | PDU Specific | Source Address | |
|---|---|---|---|---|---|---|
| Abbreviation | P | EDP | DP | PF | PS | SA |
| Bit Length | 3 bits | 1 bit | 1 bit | 8 bits | 8 bits | 8 bits |
Priority:使用 3 個位元確定訊息在網路傳輸中的優先權,數值越低優先權越高,範圍為 0 到 7。所有控制相關訊息的預設優先權為 3,對於其他資訊、專有、請求和確認訊息的預設優先權為 6。當 PGN 被加入到應用層文件時,會為其分配一個建議值,並且優先權也可以根據 OEM 的需求進行調整。
Extended Data Page:EDP 與 DP 一起用於確定 CAN ID 的結構。在 SAE 規範中,EDP 的預設初始值為 0。而對於其他協定如 ISO 11992,則會將 EDP 與 DP 同時設為 1,以區分 J1939 封包格式與其他協定的格式,並且後續的格式可以不遵循 J1939 的格式。
Data Page:與 EDP 一起用於確定 CAN ID 結構。並可整理為以下定義:
EDP DP 描述 0 0 SAE J1939 第 0 頁 PGNs 0 1 SAE J1939 第 1 頁 PGNs, SAE J1939 NMEA 2000® 1 0 SAE J1939 (保留) 1 1 ISO 11992 診斷(非 J1939 佈局!) PDU Format:一個 8 位元的欄位,用來決定 PS 的格式。範圍為 0 ~ 255。
PDU Specific:
- 當 PF < 240 時,PS 為目標地址(Destination address,DA),即將該封包傳遞給特定的目標位置,這也稱為 Specific PGN 或是 PDU1。其中,若 DA 為 0xFF,則稱為全域廣播地址(Global Broadcast Address)。
- 當 PF ≥ 240 時,PS 為組擴展(group extension,GE),表示訊息為廣播訊息,又可稱為 Global PGN 或是 PDU2。
PGN 總共為 18 個 bit,由 {EDP, DP, PF, PS} 組成。
其目的是用來辨識參數組號。類似於非擴展幀的 CAN ID,在非擴展幀中,我們用 CAN ID 來表示訊號,例如 0x100 代表車速,0x101 代表引擎狀態。PGN 在 J1939 協定中的作用類似於非擴展幀中的 CAN ID,都是用來標識訊息的類型和內容。
Source Address:網路上每個 SA 僅能對應一個裝置,因此 SA 欄位可以確保 CAN ID 的唯一性。根據 SAE J1939-81 標準,其中定義了防止 SA 重複的步驟。
由上述可以得知 PGN 一共有:
- PF < 240 :240 個
- PF ≥ 240 :16 × 256 個(PF 240 ~ 255,並對應 256 個組擴展)
再加上 EDP 與 DP 可以組成為 00, 01 兩頁,所以最多可以有:[240 + (16 × 256)] × 2 = 8672 個 PGN
其中,現有標準已經規劃 PGN,如:引擎資訊等…,與製造商可以自訂的範圍如下表所示:
| DP | PGN 範圍 (Hex) | PGN 範圍 (Dec) | PGN 數量 | SAE / 可規劃 | 通訊方式 |
|---|---|---|---|---|---|
| 0 | 00000 – 0EE00 | 0 - 60928 | 239 | SAE | 點對點 |
| 0 | 0EF00 | 61184 | 1 | 可規劃 | 點對點 |
| 0 | 0F000 – 0FEFF | 61440 - 65279 | 3840 | SAE | 廣播 |
| 0 | 0FF00 – 0FFFF | 65280 - 65535 | 256 | 可規劃 | 廣播 |
| 1 | 10000 – 1EE00 | 65536 - 126464 | 239 | SAE | 點對點 |
| 1 | 1EF00 | 126720 | 1 | 可規劃 | 點對點 |
| 1 | 1F000 – 1FEFF | 126976 - 130815 | 3840 | SAE | 廣播 |
| 1 | 1FF00 – 1FFFF | 130816 - 131071 | 256 | 可規劃 | 廣播 |
資料如何被定義與解碼?
SAE 已經針對 J1939 標準中的資料定義和解碼提供了詳細的規範(SAE J1939-71)。資料的定義主要依賴於 SPN(疑似參數編號)。
SPN 的設計核心是標準化車輛通訊參數編碼,確保車輛電子系統之間能夠準確、即時且互通地交換與解讀資料,並支援高效的診斷、維護與運營管理作業。透過 SPN 的標準化,不同品牌與型號的車輛及電子控制單元可以實現無縫資料交換,有效提升維修作業效率、診斷精度及車隊管理效能。
SPN 會定義一個參數,該參數包含名稱、縮放係數(Scaling Factor)、偏移量(Offset)、範圍、標籤與單位等屬性;至於資料長度與資料類型,則由對應的 PGN 封裝格式所決定。
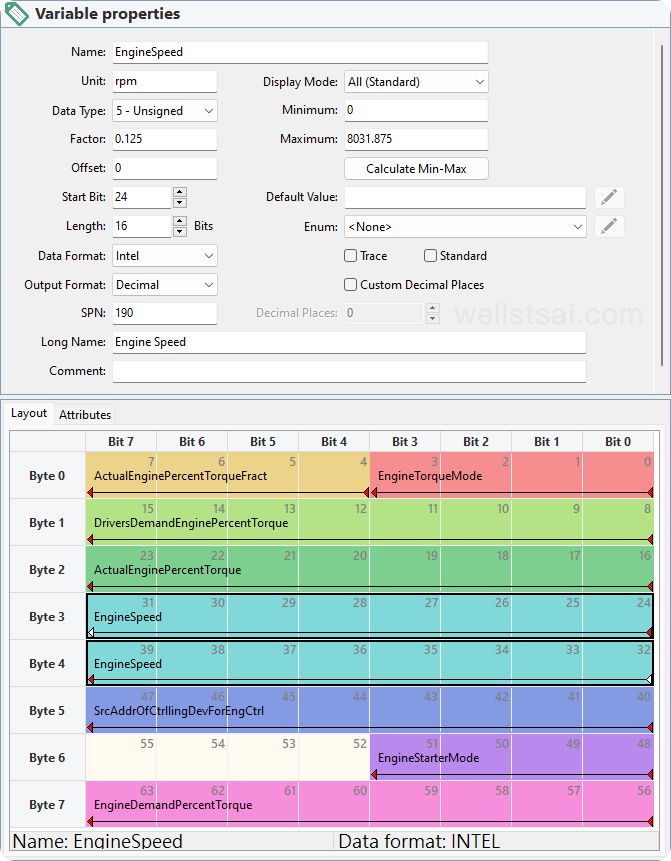
以引擎速度為例子,J1939 定義了 PGN 61444 為電子引擎控制器1(Electronic Engine Controller 1,EEC1),優先權為 3,傳送週期 50 ms,資料長度為 8 bytes。
資料如下表所示,每一個 SPN 對應特定的變數名稱:
| SPN | Name | Factor | Offset | Start Bit | Length |
|---|---|---|---|---|---|
| 4154 | ActualEnginePercentTorqueFract | 0.125 | 0 | 4 | 4 |
| 899 | EngineTorqueMode | 1 | 0 | 0 | 4 |
| 512 | DriversDemandEnginePercentTorque | 1 | -125 | 8 | 8 |
| 513 | ActualEnginePercentTorque | 1 | -125 | 16 | 8 |
| 190 | EngineSpeed | 0.125 | 0 | 24 | 16 |
| 1483 | SrcAddrOfCtrllingDevForEngCtrl | 1 | 0 | 40 | 8 |
| 1675 | EngineStarterMode | 1 | 0 | 48 | 4 |
| 2432 | EngineDemandPercentTorque | 1 | -125 | 56 | 8 |
每個 SPN 定義了名稱、倍率(Factor)和位移量(Offset)。讀取到的原始值(RAW 值)可以透過這些定義轉換為實際數值。
例如,引擎轉速(Engine Speed)總共為 16 bits,若讀取到的原始值為 17214,則引擎的轉速為 2151.75 RPM(該標準中定義的上限值為 64255,即 8031.875 RPM)。
這些資訊最終會被整理成 DBC 檔案,用於描述這些參數,可於某些特定軟體載入,並會將錄製到的參數數值自動解碼並轉換。
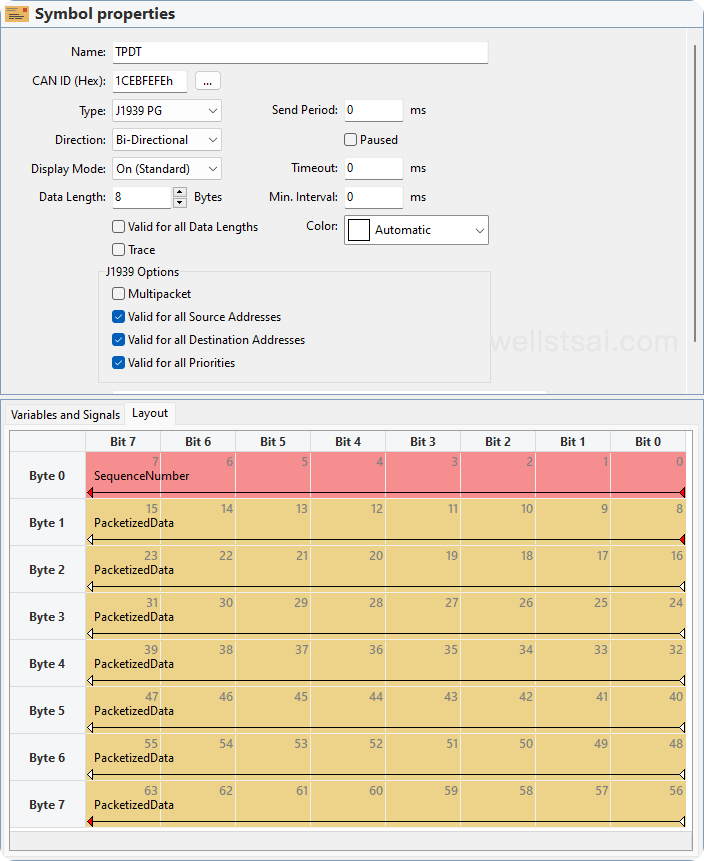
以 PEAK-CAN 所提供的符號檔案(Symbol file)為例,我們可以更清楚地看到資料在這 8 個 Byte 中的呈現方式,裡面定義了 SPN、位移量、解碼方式和單位等:
最後,一個 SPN 可以存在於多個 PGN 中。例如,廠商自己定義 SPN 30000 代表韌體資訊,在出廠前中可以透過 PGN 2000 讀取和寫入該 SPN。而產品出廠後,限定只能通過 PGN 20000 來讀取這個數值。
SPN 中文為疑似參數識別碼。在 J1939 標準中,不僅用於資料傳輸時標示參數,同時在診斷故障碼(diagnostic trouble code,DTC)中,作為指向「疑似故障對象」的唯一標識。為凸顯此診斷指向性,標準特意保留 Suspect 一詞,明確區分單純量測參數與疑似異常參數。
訊息類型
SAE J1939/21 目前記錄了總共五種訊息類型。它們是:
- 命令(Command)
- 請求(Request)
- 廣播/回應(Broadcasts/Responses)
- 確認(Acknowledgement)
- 群組功能(Group Functions)
命令
命令訊息類型實際上只是一個普通的 PGN,支持兩種 PDU 格式,PDU1 用於點對點通信,PDU2 用於廣播通信。命令類型的例子包括"變速器控制"、“地址請求”、“扭矩/速度控制"等…。
請求
PGN 為 0x0EA00。請求訊息類型被用於全域或從指定目標請求特定資料(PGN),其定義如下圖所示:
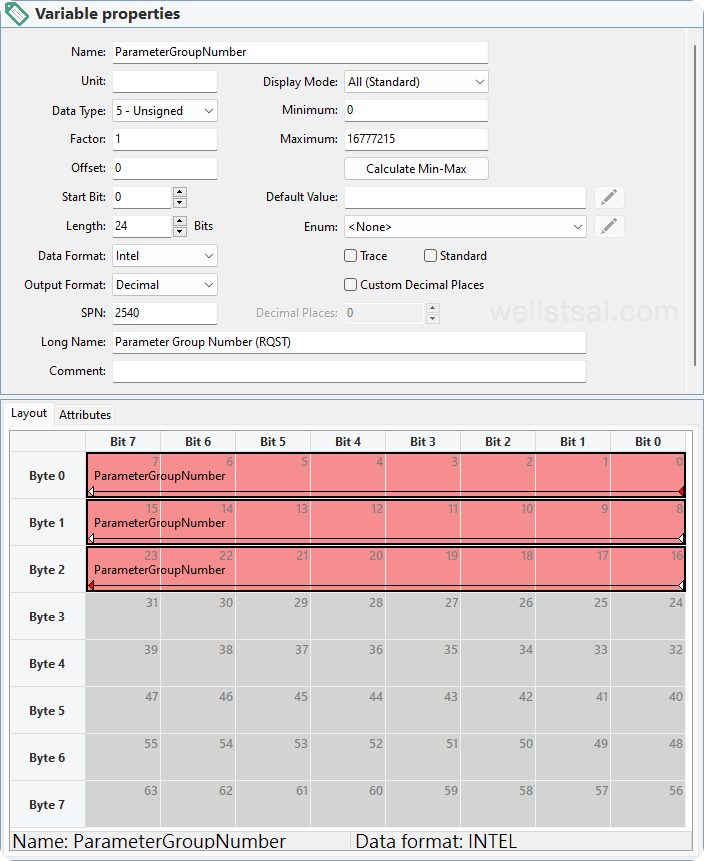
當接收端收到請求時,必須作出回應,即使這意味著在請求的 PGN 不存在時需要發送否定確認(NACK)。然而,當某個特定 PGN 不被支持時,全域請求不會觸發 NACK。
廣播/回應
廣播/回應訊息類型只是一個普通的PGN,支持兩種 PDU 格式,PDU1 用於點對點通信,PDU2 用於廣播通信。它可以是未經請求的資料廣播,也可以是對命令或請求的回應。
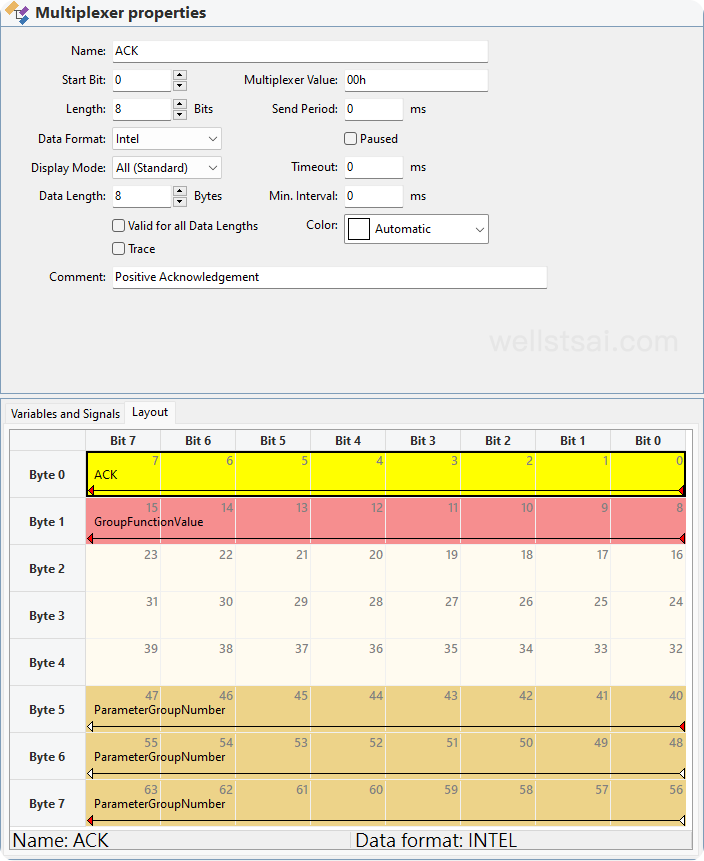
確認
PGN 為 0x0E800。提供傳輸和響應節點之間的握手機制,以確保命令或請求得到了正確處理,當收到命令或請求的回應。
SAE J1939/21 標準中並沒有明確說明確認訊息類型(Acknowledgement Message Type)只能支持 PDU1 格式。因此,目標地址可以設定為 0xFF,從而簡化接收端資料過濾的過程。
其中 ACK 分為四種,會透過首個位元組進行判別:
- Byte 0 = 0x00,Positive Acknowledgement (ACK)
- Byte 0 = 0x01,Negative Acknowledgement (NACK)
- Byte 0 = 0x02,Access Denied (有支持 PGN,但因安全原因拒絕存取)
- Byte 0 = 0x03,Cannot Respond (有支持 PGN,但 ECU 無法回應。請稍後請求資料)
群組功能
用於廠商自定義、分配的 PGN,可實現專有功能、網路管理和多包傳輸功能。
PGN 範圍:
- 0x0EF00(61184),Proprietary A
- 0x1EF00(126720),Proprietary A2
- 0x0FF00(65280) ~ 0x0FFFF(65535),Proprietary B
- 0x1FF00(130816) ~ 0x1FFFF(131071),Proprietary B2
傳送超過 8 個位元組
在傳統 CAN 中,資料長度僅能放入 8 個位元組。在 SAE J1939-21 定義了多幀傳輸方法,以傳輸超過 8 個位元組的資料長度,最多至 1785 個位元組。
在 J1939 通訊協定中,有兩種主要方法處理多幀資料傳輸:點對點訊息和廣播訊息:
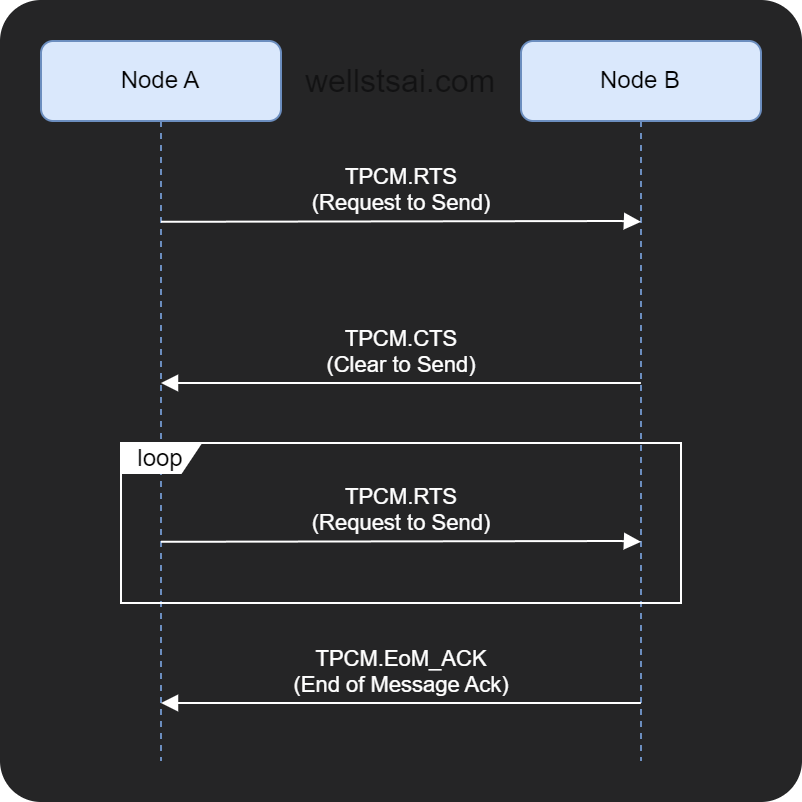
- 請求傳送/允許傳送(RTS/CTS): 使用 RTS/CTS 方法時,發送端會發送請求傳送(RTS)訊息給接收端,詢問是否可以傳送資料。接收端回應允許傳送(CTS)訊息表示可以接收資料。此方法為點對點的傳輸方式。
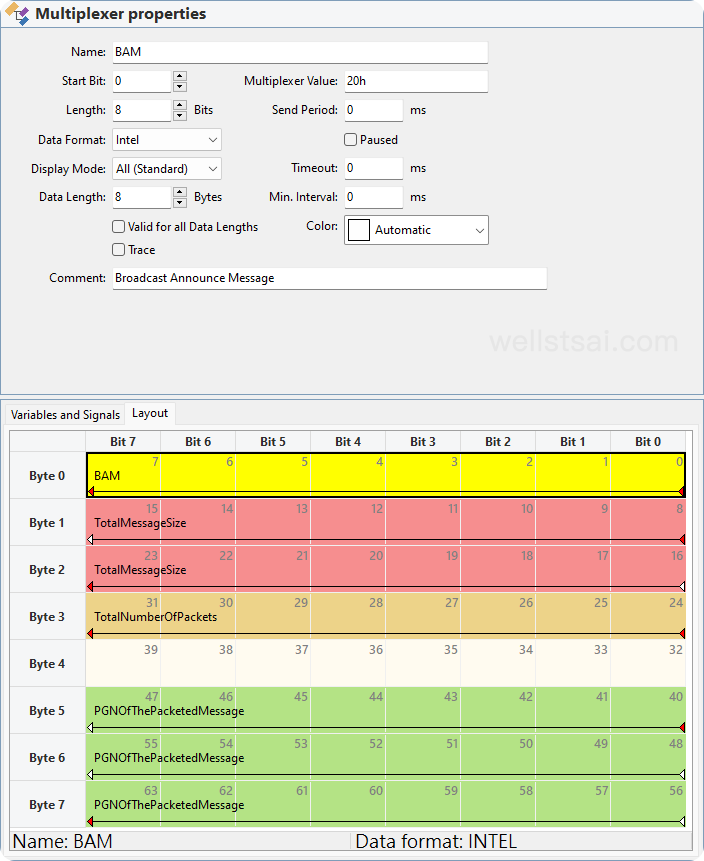
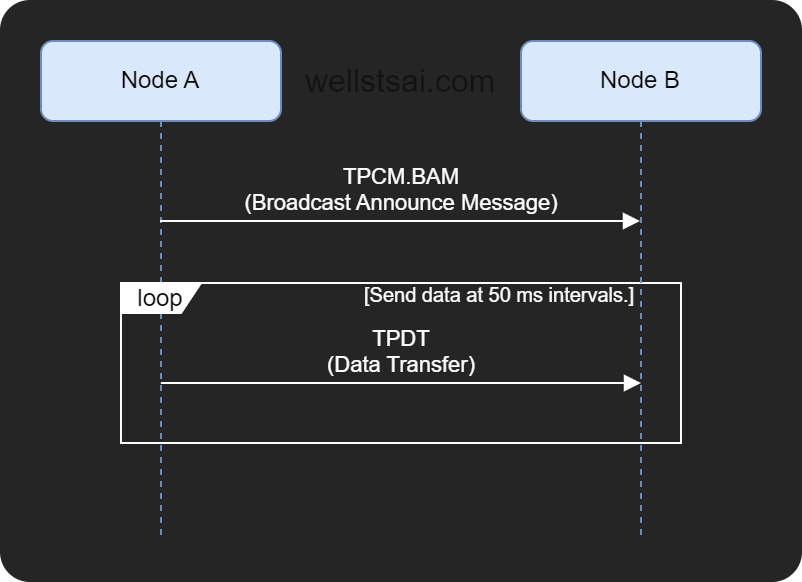
- 廣播宣告訊息(BAM):
使用 BAM 方法時,發送端會廣播一個宣告訊息,表示接下來將會有多個資料幀傳送。這種方式
不需要接收端的回應,因此適用於需要廣播給多個接收端的情況。`
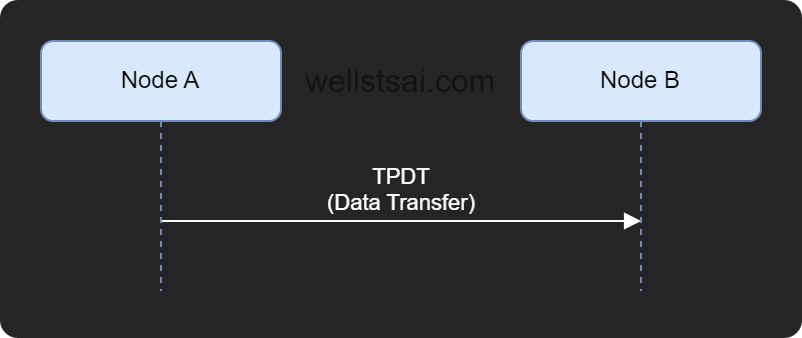
決定使用哪種方法進行傳輸,透過通訊協定 - 連接管理(transport protocol – connection management,TPCM)進行決定,並由通訊協定 - 資料傳遞(transport protocol – data transfer,TPDT)進行資料傳遞。
兩者對應的 PGN 分別為 TPCM:0x0EC00(60416)與 TPDT:0x0EB00(60160)。
TPCM
TPCM 中的 Byte 0 根據不同數值代表此封包的差異。
| 符號名稱 (PCAN) | Byte 0 | 封包說明 |
|---|---|---|
| TPCM.RTS | 0x10 (16) | 連接模式請求發送 |
| TPCM.CTS | 0x11 (17) | 連接模式準備發送 |
| TPCM.EoM_ACK | 0x13 (19) | 訊息結束確認 |
| TPCM.ConnAbort | 0xFF (255) | 連接中止 |
| TPCM.BAM | 0x20 (32) | 連接模式廣播公告訊息 |
TPDT
TPDT 中的 Byte 0 用來表示序號,範圍從 1 到 255。後續的 7 個位元組用來傳遞資料,在傳遞很長的資料時,如果未滿足 7 的倍數,則使用 0xFF 補滿。
總共 255 個序號,每次傳遞 7 個位元組,總共最多傳遞 1785 個位元組的資料。
TPCM.RTS
RTS 訊息通知網路上的某個特定節點,希望與其建立虛擬連接。RTS 訊息的 SA 會設定為發送端的地址,DA 會設定為訊息的預期接收端地址,傳遞資料內容則為訊息長度、或是所請求的 PGN 編號。
TPCM.CTS
用來回應 RTS 的訊息。CTS 訊息會通知發送端已經準備好接收一定數量的資料。
TPCM.EoM_ACK
由接收端回傳給發送端,表示整個訊息正確並在接收端重組。
TPCM.ConnAbort
可由發送或接收端進行發送,用於未完成訊息傳輸的情況下關閉連接或防止連接初始化。在封包裡面帶有中斷原因。
| 中斷代碼 | 連線中斷原因 |
|---|---|
| 0 | 保留給 SAE 指派。 |
| 1 | 已在一個或多個連線管理會話(connection managed session)中,無法支持另一個。 |
| 2 | 系統資源被用於其他任務,因此終止了此連線管理會話。 |
| 3 | 發生逾時,這是中止連線以關閉會話。 |
| 4 | 當資料傳輸進行時收到 CTS 訊息。 |
| 5 | 達到最大重傳請求限制。 |
| 6 | 意外的資料傳輸封包。 |
| 7 | 錯誤的序列號(軟體無法恢復)。 |
| 8 | 重複的序列號(軟體無法恢復)。 |
| 9 | 總資料長度大於 1785 位元組。 |
| 10–249 | 保留給 SAE 指派。 |
| 250 | 如果中止連線原因未列於表中,請使用代碼 250。 |
| 251–255 | 根據 SAE J1939-71 定義。 |
TPCM.BAM
BAM 不指定目標地址,故目標地址為 0xFF,對網路中的所有節點進行廣播。其特點在於不需要 ACK 確認,簡化了訊息的傳遞流程。
目標地址須為 0xFF (255),表示為全域廣播。
封包傳遞分析
透過雙通道 CAN,可以實現自發自收。這邊只討論 DP 為 0 的情況,但要知道 DP 可以為 1 表示為擴展 PGN。
單幀訊息傳遞(single-frame)
傳遞的資料內容,其長度 ≤ 8 個位元組。PGN 為 0xEF00 可以實現點對點或是全域廣播。或是 PGN 為 0xFF00 到 0xFFFF 實現全域廣播。
封包傳遞內容如下:
| Time Diff (ms) | Symbol | PGN | Hex Data |
|---|---|---|---|
| 0 | PropA | 0xEF00 | 01 02 03 04 05 06 07 08 |
這邊在驗證上發現即使指定目標位置(DA),如果資料長度 ≤ 8 個位元組,則接收端還是會解此封包,不確定是 PCAN 實作上的差異。然而,長度若超過 8 個位元組,由於 DA 不一致所以接收端不會處理該封包。
多幀訊息傳遞(multi-packet)
傳遞的資料內容,其長度大於 8 個位元組。又可分為廣播與點對點。
針對 BAM,對全域進行廣播傳遞。其封包傳遞內容如下,假設傳遞 15 個位元組:
BAM
BAM 傳遞間隔為 10 ms 到 200 ms [*],接收端的封包時間差最多為 750 ms。若超過此時間差並預期還有更多封包但未收到,則視為超時並自動關閉連接。
| Time Diff (ms) | Symbol | PGN | Hex Data | SA | DA |
|---|---|---|---|---|---|
| 0 | TPCM.BAM | 0xEC00 | 20 0F 00 03 FF FF FF 00 | 248 | 255 |
| 50 | TPDT | 0xEB00 | 01 01 02 03 04 05 06 07 | 248 | 255 |
| 50 | TPDT | 0xEB00 | 02 08 09 0A 0B 0C 0D 0E | 248 | 255 |
| 50 | TPDT | 0xEB00 | 03 0F FF FF FF FF FF FF | 248 | 255 |
從表格中得知,控制值為 0x20,表示為 BAM,資料長度為 0x000F,即 15 個位元組,封包數量為 0x03。後續的 TPDT 封包首位元為序號,後面帶有實際資料。若最後一個封包的資料不足 7 的倍數,則補上 0xFF。
- 由 SAE J1939-21 所定義 BAM 發送後,需等待至少 10 ms 的間隔而非 50 ms,網路上存取都寫 50 ms,PCAN 的實作也是隔了 50 ms,可能是標準已經更新。這點沒有深入詳細探討。依照官方最新的標準,發送延遲應為 10 ms 至 200 ms,接收端最長的間隔為 750 ms。
P2P
進行 P2P 傳遞資料之前,需要先聲明位置。若未事先聲明,會導致資料無法正常傳送,並可能因資料未正常送達而需要重新發送,造成網路負荷增加及延遲。
| Time Diff (ms) | Symbol | PGN | Hex Data | SA | DA |
|---|---|---|---|---|---|
| 0 | TPCM.RTS | 0xEC00 | 10 0F 00 03 FF FF FF 00 | 248 | 247 |
| 1.5 | TPCM.CTS | 0xEC00 | 11 03 01 FF FF FF FF 00 | 247 | 248 |
| 2 | TPDT | 0xEB00 | 01 01 02 03 04 05 06 07 | 248 | 247 |
| ~ 0.4 | TPDT | 0xEB00 | 02 08 09 0A 0B 0C 0D 0E | 248 | 247 |
| ~ 0.4 | TPDT | 0xEB00 | 03 0F FF FF FF FF FF FF | 248 | 247 |
| ~ 0.4 | TPCM.EoM_ACK | 0xEC00 | 13 0F 00 03 FF FF FF 00 | 247 | 248 |
表格中首先進行握手:RTS (0x10) 封包發送給目標位置 247,247 回傳 CTS 封包,表明可接收封包數量為 0x03,並指定下一個封包的序號為 0x01。之後開始傳遞資料,完成後由 247 發送 ACK 封包,確認收到的資料長度和封包數量。
如果資料長度或接收間隔時間太長(超過 750 ms),會導致接收方發送超時(Timeout)訊息,並要求重新傳輸資料。此時,接收方會傳送 TPCM.CTS 給發送端,請求特定序列號的封包以防止會話中止。
此外,如果發送端速度太慢,可能導致在 TP.DT 傳送過程中,由於接收端超時而發送 TPCM.CTS 要求重傳,並且被發送端接收到。此時,由於會話已經建立,會造成會話中斷(原因:Multi_CTS)。所以,為了避免會話中斷,發送端應確保在超時之前(750 ms)完成資料傳送。如果發送端能在接收到重傳 CTS 之前完成所有資料封包的傳送,會話將能繼續進行而不會中斷。
- RTS 失敗
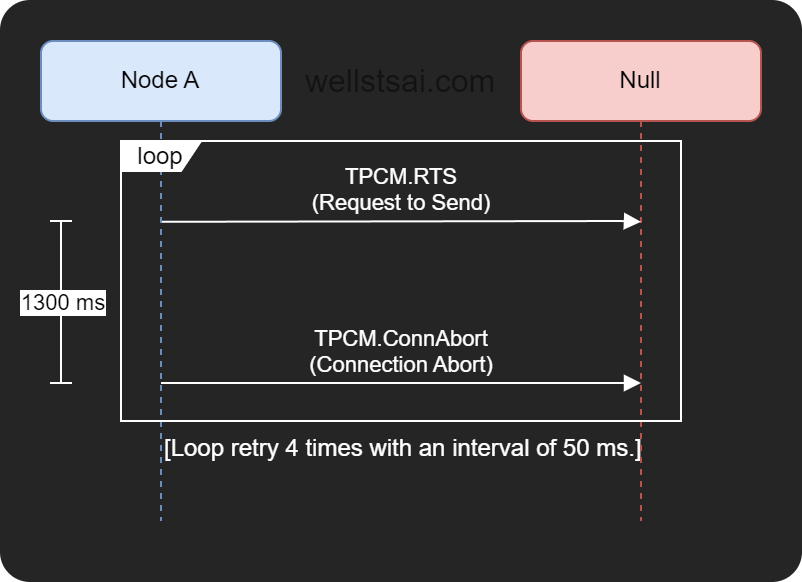
| Time Diff (ms) | Symbol | PGN | Hex Data | SA | DA |
|---|---|---|---|---|---|
| 0 | TPCM.RTS | 0xEC00 | 10 0F 00 03 FF FF FF 00 | 248 | 247 |
| 1300 | TPCM.ConnAbort | 0xEC00 | FF 03 FF FF FF FF FF 00 | 248 | 245 |
| 50 | TPCM.RTS | 0xEC00 | 10 0F 00 03 FF FF FF 00 | 248 | 247 |
| 1300 | TPCM.ConnAbort | 0xEC00 | FF 03 FF FF FF FF FF 00 | 248 | 245 |
| 50 | TPCM.RTS | 0xEC00 | 10 0F 00 03 FF FF FF 00 | 248 | 247 |
| 1300 | TPCM.ConnAbort | 0xEC00 | FF 03 FF FF FF FF FF 00 | 248 | 245 |
| 50 | TPCM.RTS | 0xEC00 | 10 0F 00 03 FF FF FF 00 | 248 | 247 |
| 1300 | TPCM.ConnAbort | 0xEC00 | FF 03 FF FF FF FF FF 00 | 248 | 245 |
當 RTS 傳輸失敗時,系統會依序進行多次重傳,每次重傳間隔約為 50 ms。如果在 1300 ms 內仍未收到回應,則發送 TPCM.ConnAbort 封包以中止連接,然後再次嘗試 RTS 傳輸。這個過程持續重複直到成功或達到最大 3 次重傳次數。
結論
本文深入探討了 SAE J1939 的主要特點與機制,包括在傳輸長度超過或未超過 8 個位元組時的處理方法。通過了解 SAE J1939 的協定,後續才能更進一步掌握 CANopen、AUTOSAR、NMEA 2000 等延伸協定的運作原理。
本文尚未涵蓋 J1939 的全部內容,例如網路管理(network management)、位置宣告(address claiming)、診斷(diagnostics)等議題。這些部分將在後續學習中有機會的話再進行探討。目前提供的資訊應該已足夠幫助理解和應用 J1939 協定的基本概念與操作方法。
更進階的議題可能涉及韌體實作及現有程式碼的整合,例如已經有人實作 Open-SAE-J1939,要如何將其整合進行應用會是比較實際的挑戰。
參考文獻
- Lawrenz, Wolfhard, ed. CAN System Engineering: From Theory to Practical Applications. Springer, 2013.
- Vector. “SAE J1939 Know-how”
- Kvaser. “Higher Layer Protocols”
- ISO. ISO 15765-3: Road vehicles — Diagnostic communication over Controller Area Network (DoCAN) — Part 3: Implementation of unified diagnostic services (UDS on CAN). ISO, 2004.
- SAE International. J1939-21-2022: Data Link Layer. SAE, 2022.
- SAE International. J1939-71-2022: Vehicle Application Layer. SAE, 2022.
- Wilfried Voss. A Comprehensible Guide to J1939. Copperhill Technologies Corporation, 2008.
- Daily, J. (2022). Introduction to SAE J1939: A primer for in-vehicle networking.